

永磁直線電機驅動中低成本位置傳感器的優(yōu)化
問題的引出
在某些應用領域中,直線電機驅動并不是用來控制精確的位置,而是調整工業(yè)過程的壓力、流量和力等,如壓縮機。位置只在底層控制中需要,而上層閉環(huán)控制量是力。在這個特殊的應用場合,沒有線性位置傳感器進行直線電機驅動幾乎是不可能的,但采用精度在10um~50μm的標準傳感器非常昂貴。此時,精度為200μm~1mm的線性傳感器是完全可以滿足要求的。類似精度的位置傳感器可以用兩個低成本霍爾互感元件、安裝接口和一小塊pcb板設計而成。為了控制直線電機的驅動,永磁體必須在電機線圈外部提供一個正弦磁場。大多數(shù)情況下,正弦磁場可以通過在一定距離范圍內放置一個小的位置傳感器檢測。傳感器可以裝在磁體和線圈附近,并且不需要傳統(tǒng)線性傳感器的軸所占的空間。
傳感器設計
利用兩個安裝在霍爾傳感元件測量磁場時,必須將傳感器件安裝在磁體的有效距離內(如圖1所示)。這樣可以得到兩個相位相差90°的正弦波,如圖2所示。利用這些信號可以控制運動的方向。

測量采用了一款易于安裝的集成傳感器件(見圖3)。包括電流源在內的霍爾傳感器件輸出已在封裝內部進行了放大。只有通道a和b的兩路測量信號需要與變流器輸入端進行接口設計,可由兩個輸出不同的運算放大器(a和b)實現(xiàn)。這樣做是為了減少電磁接口。另外,還有兩個運放校正傳感器的偏移。另一運放提供的恒定電壓作為運放a和b的共模輸入,該電壓的值為傳感器電源的一半。完整的電路圖見圖3。

傳感器的改進
傳感器的工作性能可以通過測量磁場相對于電樞的位置進行測試,見圖4。1#信號為正弦信號(2#)的測量結果,二者的差如圖中3#線所示。

為了驗證傳感器在直線電機閉環(huán)控制中的應用,將圖10右側所示的小傳感器安裝在電機上。
將所得的位置信號與精度為10μm的光電線性傳感器所得參考信號進行比較,如圖5。2#和1#線表示兩個測量信號,3#線為二者誤差。在整個測量過程內,位置的絕對誤差非常小。

傳感器的優(yōu)化
正如圖2所示,電場旋轉一周內正弦信號中會出現(xiàn)兩次大的噪聲干擾(圖6)。
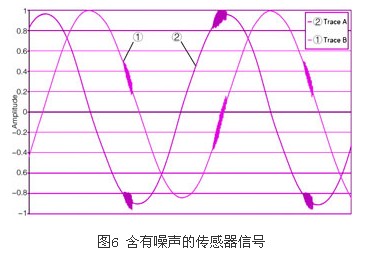
這是最靠近傳感器的線圈中流過的大電流引起的。為了得到更好的位置信號,可以對該信號進行濾波減少干擾。
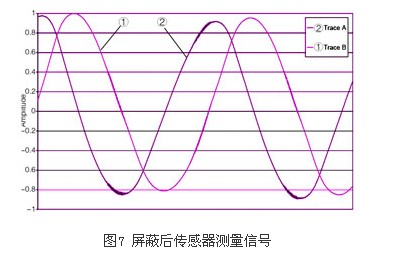
若正弦信號中夾雜的噪聲可以做到最小,傳感器的性能便可得到優(yōu)化。此過程可通過三步實現(xiàn)。首先,鋪銅的pcb板盒可以屏蔽整個傳感器,然后,利用雙絞電纜代替普通電纜,將傳感器和變流器連接。
圖7所示為屏蔽后的傳感器所測得的正弦信號。很明顯信號的干擾降低了。與圖6相比,疊加噪聲的幅值大大減小了,但對無振動的直線電機而言信號還不夠準確。
因為模擬電路是接口部分的薄弱環(huán)節(jié),在優(yōu)化過程的第二步中減少了模擬電路,而用可編程器件代替。上文中所提到的用于傳感器校準和偏移量校正的模擬器件可以省去。新傳感器的原理框圖如圖8所示。

該傳感器的優(yōu)勢是內部數(shù)字信號處理器,它提高了傳感器的精度并且減少了模擬零漂、溫度偏移和機械壓力對數(shù)學運算的影響。另外,該傳感器具有eeprom存儲器和對其編程所用的串行通信接口。這樣,不需改變pcb上的電阻就可以進行校準。對已經(jīng)安裝的傳感器,不需拆卸即可修改其參數(shù)。
對新傳感器優(yōu)化的最后一步是減小pcb板的尺寸。為此采用了4層的pcb板。與2層pcb板相比,4層pcb價格略高,但在emc兼容方面有很大優(yōu)勢,因此不再需要昂貴的傳感器屏蔽盒。所以,總的說來4層pcb板更經(jīng)濟。
圖9是新傳感器的功能圖。原來的5個運算放大器中有3個可以省去,而性能仍與之前相同。省去的器件使pcb板的尺寸進一步減小,只有原來的40%。圖10是兩個傳感器的比較。

測量
優(yōu)化后傳感器的測量結果如圖11所示。1#曲線表示位置,2#曲線表示用高精度光耦位置傳感器測得的參考位置,二者已無法區(qū)分。與圖5不同,位置誤差放大后以百分比表示,如圖11中3#曲線。優(yōu)化后傳感器的位置誤差減小為1.6%,足以應用在上文所說的場合。

結語
文中定制位置傳感器測量結果說明,底層位置控制環(huán)中使用足夠精度的低成本位置傳感器是可能的。該傳感器可以安裝在永磁直線電機內部,而不占用額外的空間。與商業(yè)光耦位置傳感器相比,該傳感器的成本低很多。
文章版權歸西部工控xbgk所有,未經(jīng)許可不得轉載。









 服務咨詢
服務咨詢